�}1�@15�p�Y��
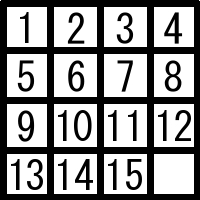
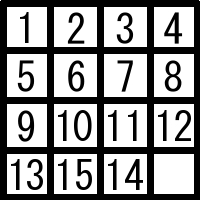
�X���C�f�B���O�u���b�N�p�Y���Ƃ����p�Y���Q�[���̒���15�p�Y���Ƃ������̂�����B�}1�̂悤��4�~4�̃}�X��1����15�܂ł̐����������Ă���1�̋�����A�𗘗p���Đ��������ւ���B�{�����ł�15�p�Y���̍ŒZ�萔�ƍŒZ�o�H�����߂鍂���ȃv���O�������쐬���邱�Ƃ�ړI�Ɍ������s�����B
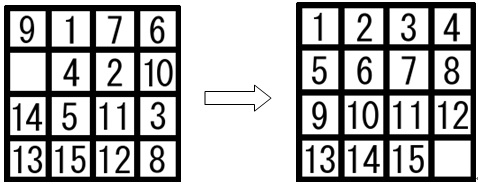
15�p�Y���Ƃ�4�~4�̃}�X��1����15�܂ł̐����������Ă���1�̋�����A�𗘗p���ď㉺���E�̃}�X���琔�������ւ��āA�}2�̂悤�ɐ�����Ԃɂ��邱�Ƃ�ړI�Ƃ����Q�[���ł���B
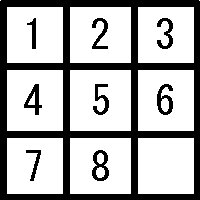
8�p�Y���Ƃ�15�p�Y���̏ꍇ4�~4�}�X�������̂��A�}3�̂悤��3�~3�}�X�ɂȂ��Ă�����̂ŁA1����8�܂ł̐����������Ă���B
�}4�̂悤��15�p�Y����8�p�Y���ł̓}�X�̐����قȂ�A15�p�Y���̕���7�����B���̂��߁A15�p�Y���̕���8�p�Y�����Ֆʂ̏�Ԑ��������������Ƃ�����B
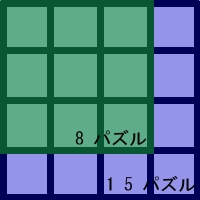
8�p�Y���̏ꍇ�̏�Ԑ��͍ő��9!=362880 �ʂ葶�݂���B�܂��A15�p�Y���̏ꍇ�̏�Ԑ���16!=20922789888000 �ʂ葶�݂���B
15�p�Y����8�p�Y���ɂ͉������Ƃ̂ł��Ȃ���肪���݂���B�}5�̂悤��15��14���������ւ������͉������Ƃ��ł��Ȃ��B���������āA15�p�Y���̉������Ƃ̂ł����Ԑ���16!/2�ƂȂ�B
�{�����ł̓Q�[�����쐬���A�����T�����邱�ƂōŒZ�萔�����߂�B�������A15�p�Y���̏�Ԑ���16!���邽�߁A�����S�ă������ɒu���ĒT�����邱�Ƃ͂ł��Ȃ��B���̂��߁A�H�v������K�v������B
�Q�[���̂���Ֆʂ�����ōs����ʂ̔Ֆʂ��l����ƁA�}6�̂悤�Ȗ̂悤�Ɏ}�����ꂷ��B�����������W�̃f�[�^�\�����Q�[���Ƃ����B
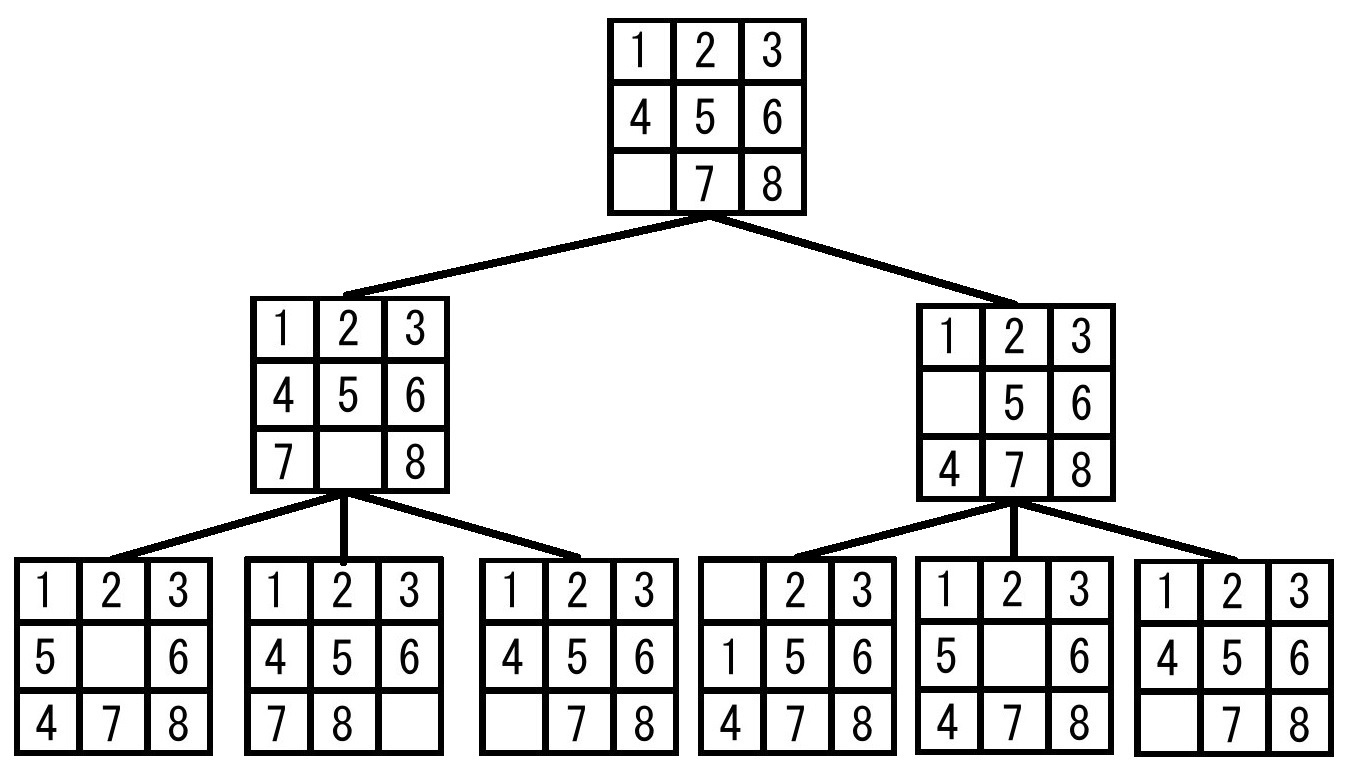
15�p�Y���̏�Ԑ��͑������߁A�T�����@���H�v���Ȃ��ƍŒZ�萔��������ɂ�Q�[�����傫���Ȃ蓚�����Ԃ��Ă���܂łɎ��Ԃ��������Ă��܂��B�����ŁA�{�����ł�A*�A���S���Y���𗘗p���Č����I�ɒT�����邱�Ƃɂ����B
A*�A���S���Y���Ƃ̓Q�[���ɑ��ă_�C�N�X�g���@�����{���邱�Ƃł���B
�_�C�N�X�g���@�Ƃ̓l�b�g���[�N�ł̍ŒZ�o�H�������I�ɋ��߂邱�Ƃ��ł���B���ɍŒZ�o�H�����߂������ɁA�������Ă��Ȃ����_�̒��ň�ԋ߂����̂���������Ă������Ƃ��J��Ԃ��čŒZ�o�H�����߂�B
A*�A���S���Y���𗘗p���邽�߂ɂ͍ŒZ�o�H�����߂������ɁA�������Ă��Ȃ��Ֆʂ̒��ŖړI�Ɉ�ԋ߂����̂�������K�v������B���̂��߁A�������Ă��Ȃ��Ֆʂ̒��ŖړI�̔ՖʂɈ�ԋ߂����̂��ǂ̔Ֆʂ��킩��Ȃ���Ȃ�Ȃ��B
�ړI�̔Ֆʂɋ߂����ǂ�����]�����邽�߂ɃR�X�g���l����B�R�X�g��f*(n)�Ƃ����f*(n)=g*(n)+h*(n)�ƒu�����Ƃ��ł���B15�p�Y���̏ꍇ�Ag*(n)�͏����Ֆʂ���̈ړ��ɂȂ�Bh*(n)�͖ړI�̔Ֆʂ܂ł̍ŏ��R�X�g�ɂȂ�B�{�����ł�h*(n)�̓}���n�b�^�������𗘗p���邱�Ƃɂ����B
�R�X�g�̌v�Z���ł���ǂꂾ���ړI�̔Ֆʂɋ߂����ǂ����킩�������ƂɂȂ�̂ŁA�R�X�g�̔�r�����邱�ƂŖړI�̔ՖʂɈ�ԋ߂��Ֆʂ�T�����Ƃ��\�ɂȂ�B�����āAA*�A���S���Y���ł͖ړI�̔ՖʂɈ�ԋ߂��Ֆʂ݂̂����o����悢�̂Ńq�[�v���g�����Ƃɂ����B
�q�[�v�Ƃ͍ŏ��l�܂��͍ő�l�����߂�̂ɓK���Ă���f�[�^�\���ł���B�{�����ł̓R�X�g���ŏ��l�̂��̂����߂邽�߂ɗ��p����B�q�͐e���傫�����������Ƃ���������B�e���_�ɂ����Ă��̒��_��菬�����Ƃ����W�����藧���Ă���B���̖͊��S�ɂ��邱�Ƃ��ł���B
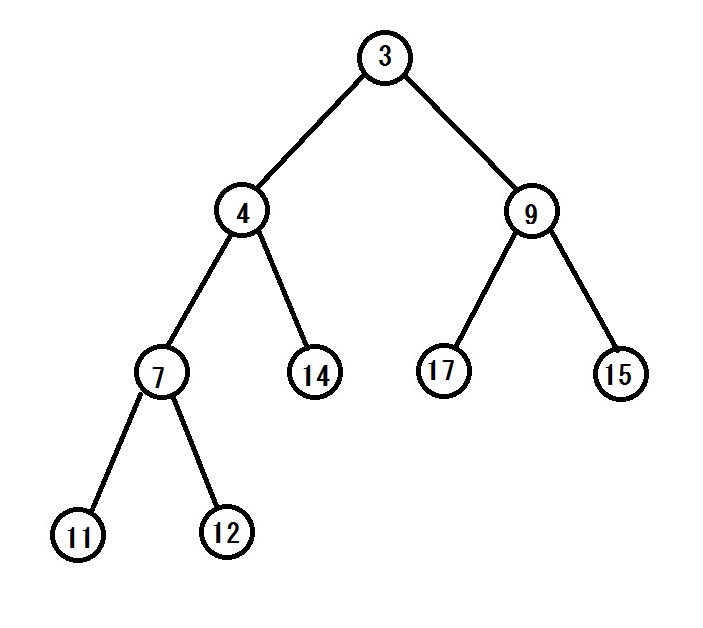
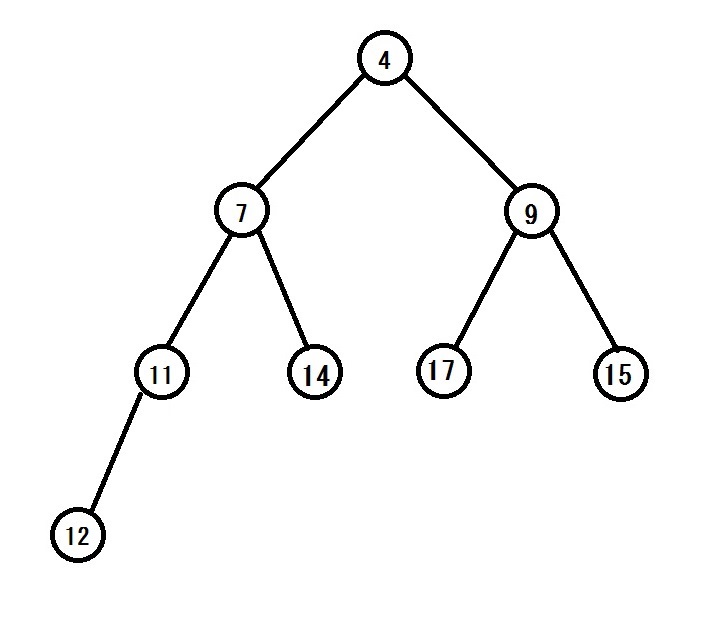
���̒��_�͖ؑS�̂ōŏ��ƂȂ�B���̇B�����o������A���S�ł��邱�Ƃ�ۂ��߇K�̒��_����U���Ɉړ����A�e�q�̑召�W��e���������Ȃ�悤�ɒ��_���������Ă����ƁA�̐[�����x�̎�ԂōĂѐ������q�[�v�ƂȂ�A�}8�̂悤�ɁA�����ŏ��̒��_�ɂȂ�B
�{�͂ł͍쐬�����v���O�����ɂ��Đ�������B�v���O�����̍쐬�Ɏg�p���������C����ł���B
�Ֆʂ�R�X�g�Ȃǂ����\���̂��ȉ��̂悤�ɂ����Bban�͔Ֆʂ����̂܂���
typedef struct heap {
int ban[SIZE];
int cost;
int moves;
struct heap *parent;
} HEAP;
moves�͈ړ�������\���Bcost��moves�ƃ}���n�b�^�������𑫂������̂ł���Bmoves�̒l�������R�̓q�[�v��cost�̒l�������̔Ֆʂ����ꂽ���Amoves�������������e�ɂȂ�悤�ɂ��邽�߂ł���Bparent�̃|�C���^�͎����̐e���ǂ̔Ֆʂ��킩��悤�ɂ��邱�ƂōŒZ�o�H�����߂邱�Ƃ��ł���B
A*�A���S���Y���𗘗p���čŒZ�萔�����߂邽�߂ɁA�܂��q�[�v��p�ӂ���B�q�[�v�͔z��g���ĕ\���ł���B
HEAP *heap = NULL;
if (heap == NULL){
if ((heap = malloc(ARRAY*sizeof(HEAP))) == NULL) {
fprintf(stderr, "�������[�G���[\n");
exit(1);
}
}
#define�Œ�`����ARRAY�̐��l��ς��邱�ƂŃq�[�v�̑傫����ς��邱�Ƃ��ł���B�܂��A�T���ς݂̔Ֆʂ����Ă���close�z����p�ӂ���B
����A*�A���S���Y���𗘗p���čŒZ�萔�ƍŒZ�o�H�����߂Ă����B
while (checkGoal(temp->ban) != 1){//�S�[�����`�F�b�N
temp->parent = add_node(temp,close,closelast);//close�ֈړ����e�̃A�h���X���
closelast++;
//�אڃm�[�h�����A�R�X�g�v�Z�A�q�[�v�֒lj�
last = move(temp->ban, last, temp->moves, heap, temp->parent,close,closelast);
//�ŏ��l�����o��
last--;
temp = minimum(heap, last);
//�q�[�v�g����
down_sort(heap,last);
}
�q�[�v������o�����Ֆʂ��ړI�̔Ֆʂł��邩���m�F���邽�߂�checkGoal�����g���B�����A�ړI�̔Ֆʂł������ꍇ�̓��[�v���I���B
�ړI�̔ՖʂłȂ��ꍇ��add_node���𗘗p���ăq�[�v������o�����Ֆʂ�T���ς݂Ƃ���close�z��ֈڂ��B������move�����g�����O��close�z��֓��ꂽ�Ֆʂ�e�Ƃ���אڃm�[�h�����Adistance�����g���R�X�g�̌v�Z������add_heap���Ńq�[�v�֒lj�����B�q�[�v�֒lj������̂ŁAup_sort�����g���q�[�v��g�����B
����minimum�����g���q�[�v����R�X�g���ŏ��̔Ֆʂ����o���B
�����āAdown_sort�����g���q�[�v��g�����B
�����̓����ړI�̔Ֆʂ������܂ŌJ��Ԃ��B�ŏ��ɖړI�̔Ֆʂ����ꂽ���̂��ŒZ�萔�ł���B
�ŒZ�萔�̖ړI�̔Ֆʂ������邱�Ƃ��o������A�ŒZ�o�H�����߂�B�q�[�v�ɂ���Ֆʂ�close�z��ɂ���T���ς݂̔Ֆʂ�HEAP�\���̂Ȃ̂Ŏ����̐e�̃|�C���^�������Ă���B
���������āA�ŒZ�萔�̖ړI�̔Ֆʂ��珇�Ԃɐe��H���čs���ŒZ�o�H��������B�����print���Ƃ��č쐬�����B
�쐬�����v���O�����ɑ��Čv�Z���Ԃ𑪒肵���B�����_���ɐ��������Ֆʂɑ��čŒZ�萔���Ƃ̌v�Z���Ԃ͐}9�̂悤�ɂȂ����B
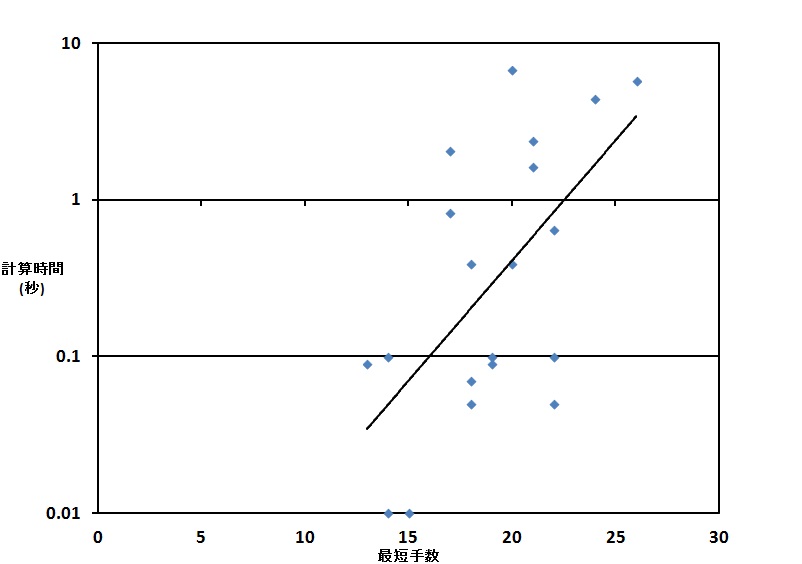
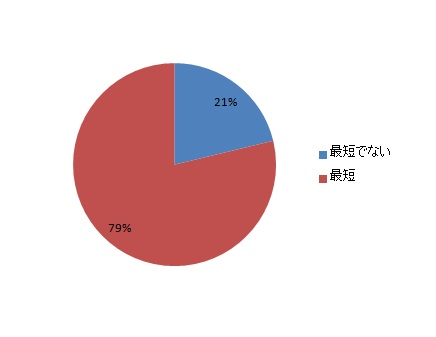
����A���߂������ŒZ�łȂ�����������}10�Ɏ����B
�ŒZ�萔��26��ȉ��̖��ɑ���7�b�ȓ��ʼn������Ƃ��ł����B�܂��A�ŒZ�萔��������ɂ�v�Z���Ԃ��w�����I�ɑ����Ȃ��Ă��邱�Ƃ�������B���������āA�ŒZ�萔��40�������ɂ��Ă̓�������ɑ��݂���Ֆʂ������Ȃ肷���ē��������߂邱�Ƃ��ł��Ȃ��Ȃ��Ă����B�Œ��ŒZ�萔�ł���80��̖��̓����������邱�Ƃ͍���ł���B
�ȏ���15�p�Y���������ɉ����v���O�������쐬�ł����ƌ����邪�A�������ŒZ�萔�����߂邱�Ƃ��ł��Ȃ���肪���݂��邽�߃v���O���������ǂ���K�v������B
�܂��A�{�����ł̓R�X�g�̌v�Z��h*(n)���}���n�b�^�������Ƃ��Ă������A�ʂ̕]�������g���Ȃǂ��邱�ƂŌ����I�ɍŒZ�萔�����߂邱�Ƃ��ł���ƍl����B
�ߔN�̃p�\�R���ł̓v���Z�b�T�̒��̃R�A���������邽�ߕ��������邱�Ƃ��ł���A�R�A���ɂ���Ă�葁���ŒZ�萔�����߂邱�Ƃ��\�ł���ƍl����B
�{�����ł͔Ֆʂ̏�������̂�int�^�̔z����g�p���Ă��邪�A�����char�^�̔z��֕ύX����Ȃǃ������̎g�p�ʂ����炷���Ƃ����߂���B
C�����p����15�p�Y���̍ŒZ�萔�ƍŒZ�o�H�����߂邱�Ƃ�ڕW�Ɍ������s�����B15�p�Y���Ȃǂ̐g�߂ȃp�Y���ł������̂悢��@���������Ă��Ȃ����̂�����B
�q�[�v��A*�A���S���Y���Ȃǂ�15�p�Y���̍ŒZ�o�H�����߂邽�߂ɂł������̂ł͂Ȃ��B�������A�v���O�������H�v������g�ݍ��킹�ė��p���邱�ƂŐF�X�Ȗ��������ł���\��������B
�{�����ō쐬�����v���O�����̃\�[�X�R�[�h main.c